对于其雷达信号处理器,IWR1642集成了德州仪器(TI)C674x数字信号处理器(DSP)内核(图4)。 IWR1642 DSP是专为FMCW信号处理而设计的,以600 MHz时钟运行,并由32 KB L1程序(L1P)和数据(L1d)高速缓存支持,以及256 KB统一程序/数据L2高速缓存,以加快DSP的运行速度。 如有必要,开发人员可以严格使用IWR1642作为雷达信号处理器。

图4:德州仪器(TI)IWR1443 mmWave器件与RF /模拟前端一起集成了一个数字子系统,该子系统包括一个Arm Cortex-R4F作为主处理器以及一个德州仪器(TI)C674x数字信号处理(DSP)内核,用于雷达信号处理。 (图片来源:德州仪器)
内置在主控制和雷达子系统中的硬件在环(HIL)模块允许开发人员使用设备的数据修改模块(DMM)输入端口绕过RF前端,并将原始雷达数据加载到IWR1642中,以用于信号处理。
雷达信号处理链
尽管选择IWR1443的硬件加速器还是IWR1642的C674x DSP内核取决于每个应用程序的独特要求,但是对于大多数开发人员而言,所选设备在应用程序中的操作将基本透明。在德州仪器(TI)mmWave解决方案架构中,TI mmWave软件环境可以使用任一设备的资源来执行称为数据处理单元(DPU)的功能模块,这些模块负责通常在雷达信号处理中使用的各个数据转换。在TI mmWave DPU中,核心功能包括:
范围FFT:在活动帧内的采集周期内读取线性调频数据,以生成用于范围计算的一维FFT,并生成雷达数据立方体。这是存储在专用L3雷达数据存储器中的距离,线性调频和天线数据的三维(3D)矩阵。
去除静态杂波:从样本集中减去样本的平均值。
多普勒FFT:执行2D FFT计算以精炼帧之间的雷达立方体数据,并生成雷达目标检测算法使用的检测矩阵。
CFAR:这将执行常用于对象检测的恒定误报率(CFAR)算法。
CFAR单元平均:这将AoA与CFAR模块结合在一起,以实现雷达系统常用的CFAR单元平均(CFAR-CA)算法,以针对噪声背景检测物体。
用于群集,组跟踪和分类的其他DPU提供了针对雷达信号数据的特定于应用程序的进一步改进。
使用TI mmWave软件开发工具包(SDK),开发人员可以使用对数据路径管理器(DPM)应用程序编程接口(API)的调用,将不同的DPU组合到所需的检测(或数据)处理链(DPC)中。例如,实现DPC进行对象检测(图5)仅需要几个基本调用,如Texas Instruments mmWave SDK发行版(清单1)中包含的示例代码所示。
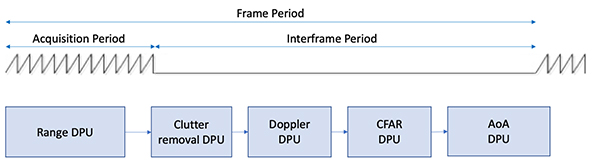
图5:典型的目标检测处理链结合了单独的数据处理单元(DPU),这些数据处理单元执行雷达信号处理功能,例如在采集周期内进行距离FFT计算,以及在帧间周期内进行其他数据转换。 (图片来源:德州仪器)
for(i = 0; i < RL_MAX_SUBFRAMES; i++) { subFrmObj = &objDetObj->subFrameObj[i]; subFrmObj->dpuRangeObj = DPU_RangeProcHWA_init(&rangeInitParams, errCode); if (*errCode != 0) { goto exit; } subFrmObj->dpuStaticClutterObj = DPU_StaticClutterProc_init(errCode); if (*errCode != 0) { goto exit; } subFrmObj->dpuCFARCAObj = DPU_CFARCAProcHWA_init(&cfarInitParams, errCode); if (*errCode != 0) { goto exit; } subFrmObj->dpuDopplerObj = DPU_DopplerProcHWA_init(&dopplerInitParams, errCode); if (*errCode != 0) { goto exit; } subFrmObj->dpuAoAObj = DPU_AoAProcHWA_init(&aoaInitParams, errCode); if (*errCode != 0) { goto exit; } }
清单1:包含在Texas Instruments mmWave SDK发行版中的示例代码,如此代码段,说明了通过向ObjDetObj结构中添加一组DPU来创建DPC的基本设计模式。 (代码来源:德州仪器)
分层软件环境中的软件服务使用DSP子系统(DSS),主子系统(MSS)和加速器或两者的组合自动实现DPU(图6)。 在应用程序级别,开发人员使用mmWave API从完全配置的DPC访问DPU结果,或通过mmWaveLink API直接访问mmWave前端。
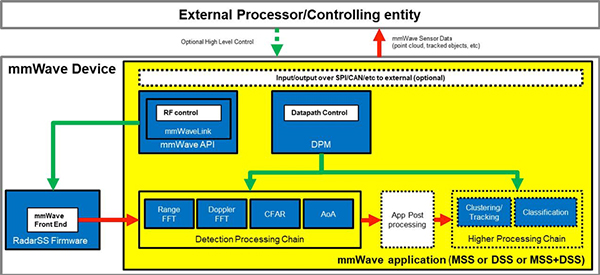
图6:德州仪器(TI)mmWave环境提供了多个应用程序编程接口(API),这些接口可隐藏雷达系统操作的详细信息,从而简化运动检测应用程序的开发。 (图片来源:德州仪器)
对于特定应用,mmWaveLink提供的一项关键服务是内部雷达定时引擎的配置,该引擎会生成FMCW线性调频脉冲和线性调频脉冲帧。如前所述,线性调频和线性调频帧特性决定了对象检测性能,但是实际的限制意味着对某些性能设置的选择会在其他设置中产生限制。
例如,由于最大检测范围与频率斜率成反比,因此需要远程检测的开发人员需要使频率斜率最小。这样做会影响线性调频扫频的带宽,导致分辨率降低,因为检测范围的分辨率与该带宽特性成正比。实际上,优化的线性调频和线性调频帧操作规范是雷达设计的关键因素,要求开发人员平衡多种线性调频特性(图7)。

图7:对象检测范围和分辨率主要取决于传输的线性调频脉冲的特性,要求开发人员仔细优化线性调频脉冲发生器配置中的设置。 (图片来源:德州仪器)
除了提供用于评估线性调频设置的在线mmWave传感估算器工具外,德州仪器(TI)在其mmWave传感器的工业工具箱中还针对特定用例提供了广泛的线性调频数据库以及推荐的线性调频配置。开发人员可以找到涵盖从高分辨率手势识别到远程交通监控的应用的参考设计和示例代码。基于mmWave BoosterPacks构建的示例应用程序使开发人员可以快速评估mmWave性能,并为自己的自定义应用程序扩展参考设计。例如,要评估手势控制,开发人员可以将IWR1443 BoosterPack(IWR1443BOOST)评估模块(EVM)连接到其Windows PC上的USB连接,上传预构建的固件,并探索检测复杂的手势,例如手指旋转(图8)。

图8:使用德州仪器(TI)IWR1443BOOST EVM和可用的示例代码,开发人员可以探索mmWave技术在动态高分辨率手势识别方面的应用,例如使用旋转手指控制成像系统。 (图片来源:德州仪器)
对于手势识别,IWR1443BOOST EVM可以用作唯一的硬件平台。 在其他示例中,德州仪器(TI)演示了mmWave BoosterPack及其LaunchPad开发套件的组合使用。 例如,人员跟踪应用程序将IWR1642BOOST EVM与LAUNCHXLCC1352R1无线MCU LaunchPad结合在一起,以演示对远程部署雷达系统中人员的检测和跟踪。 该参考设计展示了不同线性调频设置对扩展最大范围的影响,但以分辨率为代价(图9)。
毫米波雷达条件产品需求联系:sales@gamtic.com,135 8596 2889.
| ParameterCase-1, 6m (MIMO), Conference RoomCase-2, 5m (MIMO), ElevatorCase-2, 14m (MIMO), Office SpaceCase-4, 14m (MIMO), HallwayCase-5, 50m (MIMO), OutdoorDevice TypeIWR1642IWR1642IWR1642IWR1642IWR1642Maximum range (m)5.65.6141450Range resolution (m)0.0490.0490.120.120.49Maximum velocity (km/h)19.05719.05718.918.928.06Velocity resolution (km/h)0.2970.2970.2970.2970.449Total Sweep Bandwidth (MHz)3061.22372012501250361.3Update rate (Hz)2020202030Radar Cube Size (KB)512512512512512Processing ChainPeople CountingPeople CountingPeople CountingPeople CountingTraffic Monitoring |
图9:一个示例性的Texas Instruments mmWave应用程序提供了多种线性调频配置,使开发人员能够研究线性调频特性与检测性能之间的关系。 (图片来源:德州仪器)
结论
毫米波技术提供的范围和精度优势远远超过了早期方法所能达到的优势。 但是,对于开发人员而言,硬件和软件方面的多重挑战限制了该技术的部署。 德州仪器(TI)提供的mmWave设备,开发工具和全面的软件环境大大降低了使用mmWave技术实施复杂的对象检测和跟踪应用程序的障碍。




 首页
首页


