与雷达原理相似,激光雷达使用的技术是飞行时间(TOF, Time of Flight)。具体而言,就是根据激光遇到障碍物后的折返时间,计算目标与自己的相对距离。激光光束可以准确测量视场中物体轮廓边沿与设备间的相对距离,这些轮廓信息组成所谓的点云并绘制出3D环境地图,精度可达到厘米级别,从而提高测量精度。
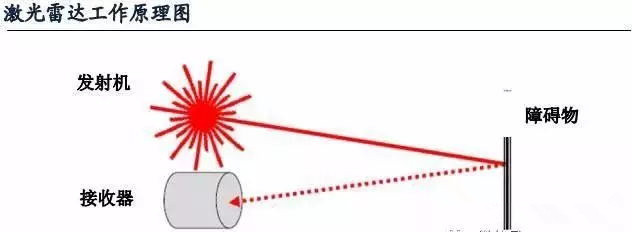
想象一下,当发出光脉冲时启动秒表,然后当光脉冲(从遇到的第一个物体反射出来)返回时停止计时器。通过测量激光的“飞行时间”,并且知道脉冲行进的速度,就可以计算距离。光以每秒30万千米的速度传播,因此需要非常高精度的设备来产生关于距离的数据。
为了产生完整的点云,传感器必须能够非常快速地对整个环境进行采样。激光雷达能够做到这一点的一种方式是通过在单个发射器/接收器上使用非常高的采样率。 每个发射器每秒发射数万或数十万个激光脉冲。这意味着,多达100000个激光脉冲在1秒内完成从激光器单元上的发射器到被测量的物体的往返行程,并返回到激光雷达单元上位于发射器附近的接收器。
然而,固定线不足以映射整个环境——它只是在非常集中的区域给出非常清晰的分辨率。因此,许多激光雷达系统使用旋转组件或旋转镜来使线围绕环境进行360度扫描。常见的策略包括使单个发射器和接收器向上或下偏转使激光器视野覆盖范围更大。 例如,Velodyne的64线激光雷达系统具有26.8度的垂直视角(通过旋转使其拥有360的度水平视角)。这个激光雷达可以从50米开外看到一个12米高的物体的顶部。
下图中可以看到,距离激光雷达的远近不同,点云的疏密程度也不相同,这是由于数据保真度随着距离而下降。虽然它不是完美的,但是较高分辨率可用于较近的物体,因为随着到传感器的距离增加,发射器之间的角度(例如,2度)会导致这些点带之间的间隔更大。
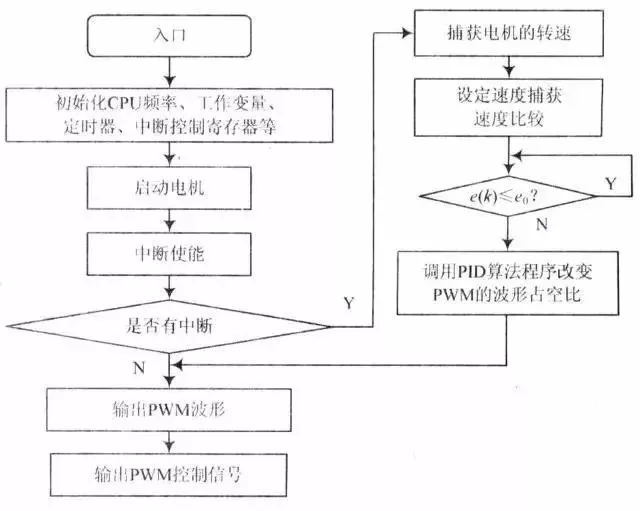
在ADAS系统中,激光雷达通过透镜、激光发射及接收装置,基于TOF飞行时间原理获得目标物体位置、移动速度等特征数据并将其传输给数据处理器;同时,汽车的速度、加速度、方向等特征数据也将通过CAN总线传输到数据处理器;数据处理器对目标物体及汽车本身的信息数据进行综合处理并根据处理结果发出相应的被动警告指令或主动控制指令,以此实现辅助驾驶功能。
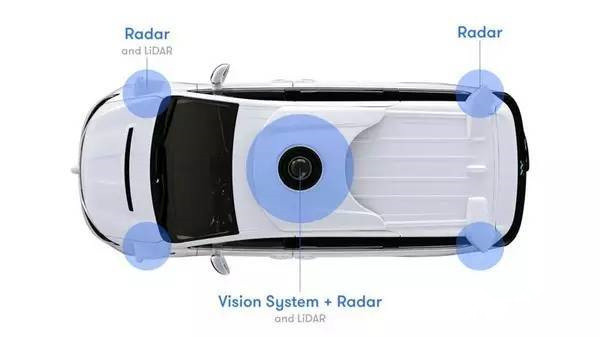
下图展现的是谷歌无人驾驶公司Waymo在汽车上使用的激光雷达的布局:
激光雷达按有无机械旋转部件分类,包括机械激光雷达和固态激光雷达。机械激光雷达带有控制激光发射角度的旋转部件,而固态激光雷达则依靠电子部件来控制激光发射角度,无需机械旋转部件。
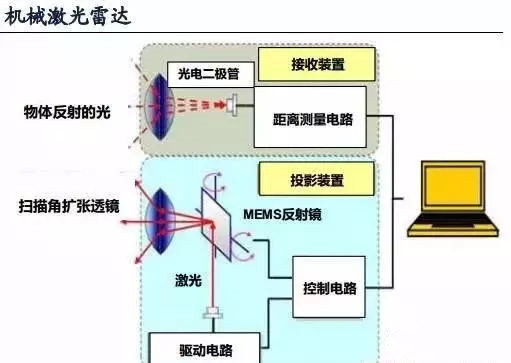
机械激光雷达由光电二极管、MEMS反射镜、激光发射接受装置等组成,其中机械旋转部件是指图中可360°控制激光发射角度的MEMS发射镜。
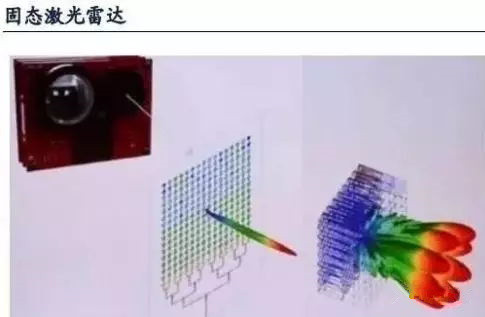
固态激光雷达与机械雷达不同,它通过光学相控阵列(OpticalPhasedArray)、光子集成电路(PhotonicIC)以及远场辐射方向图(FarFieldRadiationPattern)等电子部件代替机械旋转部件实现发射激光角度的调整。
光学相控阵和微波相控阵是一个原理,利用的是光的相干干涉,出现了相位差,也就出现了干涉峰。所以如何让通过器件后光产生相位差是研究的重点,这就需要找到合适的材料和激发方法。现在的激发方法主要是电光扫描,也就是通过加电使材料产生相位差。现在两种比较热,一个是光波导阵列,一个是MEMS器件的,MEMS器件这个优点是扫描的速度快,但是感觉不是那么必要,因为瓶颈还是在扫描角度这儿,所以现在MEMS原理的商业产品还没有看到。
光波导阵列通过加电方式来实现光束扫描,利用光波导电光效应,对波导芯层加载电压,使每个波导芯层具有不同的附加折射率,波束得以在波导阵元输出截面光场具有不同的附加相位差,相位差按一定规律分布可引起输出光速的偏转。通过相位差按照一定规律分布输出,从而实现光束的扫描。
固态激光雷达优势:响应速度快,控制电压低,扫描角度大,价格低。
 首页
首页



