最近频频“出事”的特斯拉让不少人对自动驾驶产生了顾虑,这其中到底有哪些技术尚不成熟,解法又是什么?相信是许多人心中的疑问。
事实上,对于自动驾驶,也许你的理解还有些误会。智能内参曾经分享过波士顿咨询的一篇自动驾驶报告,非常详细的解释了自动驾驶的状态是分层级的,0级全部需要人来操作,5及自动驾驶则完全不需要人来做任何操作。

那么在明确了自动驾驶、辅助驾驶等概念具体的指代后,我们要知道想做到5级的全自动化驾驶,一定需要多种传感器的配合,因为他们充当了汽车的机器感官。同时,除了传感之外,现有技术还需要在计算机算法、决策执行甚至车载网联通信上面做各种优化,才能让汽车像人类“老司机”一样灵活、果断、反应迅速。当然,机器靠谱的一点是:它从不喝酒。
在自动驾驶的众多传感器方面,本文将会从激光雷达这个角度切入,详细介绍这个细分行业的现状,以及能让自动驾驶重量级玩家相中的种子级选手都有哪些。本期报告来自广发证券。
激光雷达是什么?
说穿了,它就是雷达,干得也是同样的活,就是探测目标位置,监测移动速度。区别在于激光雷达用的是激光,而传统意义上的雷达用的是超声。
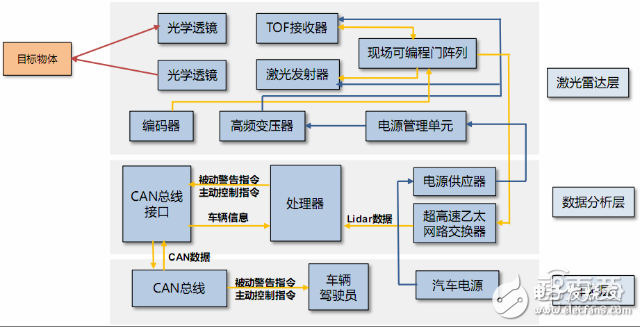
原理
与雷达原理相似,激光雷达使用的技术是飞行时间(TOF,Time of Flight)。 具体而言,就是根据激光遇到障碍物后的折返时间,计算目标与自己的相对距离。激光光束可以准确测量视场中物体轮廓边沿与设备间的相对距离,这些轮廓信息组成所谓的点云并绘制出3D环境地图,精度可达到厘米级别,从而提高测量精度。
而事实上,激光雷达作为“机械之眼”,也大量应用在无人机、机器人等等方向上,只不过今天我们只讨论自动驾驶这个范畴。
优势
高级辅助驾驶系统(ADAS)及无人驾驶系统中常用的环境传感器包括摄像头、 激光雷达、毫米波雷达等。相比于摄像头,激光雷达的最大优势在于使用环境限制较小,即不管在白天或是夜晚都能正常使用。

对于标准车载雷达及毫米波雷达,当其所发射的电磁波在传播路径上遇到尺寸比波长小的物体时,将会发生衍射现象,即波的大部分能流绕过物体继续向前方传播,反射回来可供雷达接收的能量则很小,因此,无法探测大量存在的小型目标。
而用于雷达系统的激光波长一般只有微米的量级,因而它能够探测非常微小的目标,测量精度也远远高于毫米波雷达及其他车载标准雷达。
不过,激光雷达也存在着价格昂贵等劣势。激光雷达的测量精度与其雷达线束的多少有关,线束越多,测量精度越精准,ADAS无人驾驶系统的安全性也越高。但同时,线束越多,其价格也越昂贵。目前,虽然低成本化是激光雷达的一大趋势,但出于对驾驶安全性的考虑,高价激光雷达仍然占据主流。

分类及发展趋势
激光雷达按有无机械旋转部件分类,包括机械激光雷达和固态激光雷达。根据线束数量的多少,又可分为单线束激光雷达与多线束激光雷达。而未来的发展方向将会从机械走向固态,从单线束走向多线束。因为固态激光雷达与机械激光雷达比起来,尺寸较小、性价比较高、测量精度相对低一些,可隐藏于汽车车体内,不会破坏外形美观。多线束激光雷达则会比单线束视野范围更广。

应用的发展瓶颈在于成本
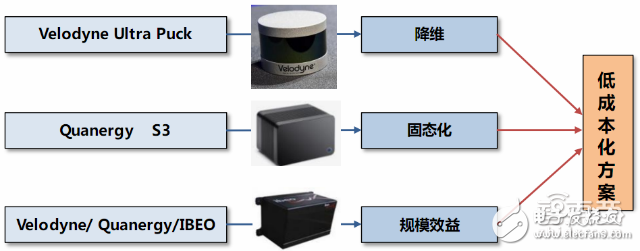
目前行业有三种方式来降低整个激光雷达的成本与价格:
(1)降维,即使用低线束低成本激光雷达配合其他传感器。
(2)用全固态激光雷达代替机械激光雷达。
(3)通过规模效益降低激光雷达的单个成本。
巨头们的选择
1.美国老牌Velodyne
谷歌在其最早的自动驾驶原型汽车中所使用的LiDAR传感器就是由该公司开发的。美国Velodyne公司成立于1983年,其3D激光雷达产品种类丰富,包括16线束、32线束及64线束等,其中还有专门为智能驾驶汽车设计的Ultra Puck激光雷达。

 首页
首页



