Lidar是通过发射激光束来探测目标位置、速度等特征量的雷达系统,具有测量精度高、方向性好等优点,具体如下:
1、具有极高的分辨率
激光雷达工作于光学波段,频率比微波高2~3个数量级以上,因此,与微波雷达相比,激光雷达具有极高的距离分辨率、角分辨率和速度分辨率;
2、抗干扰能力强
激光波长短,可发射发散角非常小(μrad量级)的激光束,多路径效应小(不会形成定向发射,与微波或者毫米波产生多路径效应),可探测低空/超低空目标;
3、获取的信息量丰富
可直接获取目标的距离、角度、反射强度、速度等信息,生成目标多维度图像;
4、可全天时工作
激光主动探测,不依赖于外界光照条件或目标本身的辐射特性。它只需发射自己的激光束,通过探测发射激光束的回波信号来获取目标信息。
但是激光雷达最大的缺点——容易受到大气条件以及工作环境的烟尘的影响,要实现全天候的工作环境是非常困难的事情。
与雷达原理相似,激光雷达使用的技术是飞行时间(TOF, Time of Flight)。具体而言,就是根据激光遇到障碍物后的折返时间,计算目标与自己的相对距离。激光光束可以准确测量视场中物体轮廓边沿与设备间的相对距离,这些轮廓信息组成所谓的点云并绘制出3D环境地图,精度可达到厘米级别,从而提高测量精度。
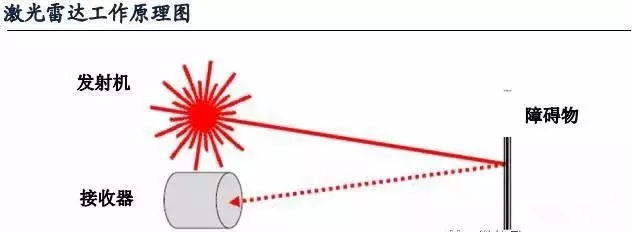
想象一下,当发出光脉冲时启动秒表,然后当光脉冲(从遇到的第一个物体反射出来)返回时停止计时器。通过测量激光的“飞行时间”,并且知道脉冲行进的速度,就可以计算距离。光以每秒30万千米的速度传播,因此需要非常高精度的设备来产生关于距离的数据。
为了产生完整的点云,传感器必须能够非常快速地对整个环境进行采样。激光雷达能够做到这一点的一种方式是通过在单个发射器/接收器上使用非常高的采样率。 每个发射器每秒发射数万或数十万个激光脉冲。这意味着,多达100000个激光脉冲在1秒内完成从激光器单元上的发射器到被测量的物体的往返行程,并返回到激光雷达单元上位于发射器附近的接收器。
然而,固定线不足以映射整个环境——它只是在非常集中的区域给出非常清晰的分辨率。因此,许多激光雷达系统使用旋转组件或旋转镜来使线围绕环境进行360度扫描。常见的策略包括使单个发射器和接收器向上或下偏转使激光器视野覆盖范围更大。 例如,Velodyne的64线激光雷达系统具有26.8度的垂直视角(通过旋转使其拥有360的度水平视角)。这个激光雷达可以从50米开外看到一个12米高的物体的顶部。
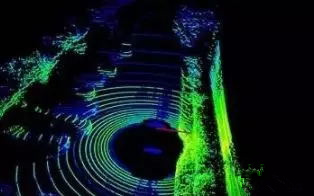
下图中可以看到,距离激光雷达的远近不同,点云的疏密程度也不相同,这是由于数据保真度随着距离而下降。虽然它不是完美的,但是较高分辨率可用于较近的物体,因为随着到传感器的距离增加,发射器之间的角度(例如,2度)会导致这些点带之间的间隔更大。
在ADAS系统中,激光雷达通过透镜、激光发射及接收装置,基于TOF飞行时间原理获得目标物体位置、移动速度等特征数据并将其传输给数据处理器;同时,汽车的速度、加速度、方向等特征数据也将通过CAN总线传输到数据处理器;数据处理器对目标物体及汽车本身的信息数据进行综合处理并根据处理结果发出相应的被动警告指令或主动控制指令,以此实现辅助驾驶功能。


 首页
首页


